- HOME
- 製品情報
- フレキシブル基板(FPC)
- 耐捻回性について
フレキシブル基板(FPC)
耐捻回性について
1.FPCの可動形態について
電子機器小型化のため、配線スペースの削減が推進されており、FPCは電子機器の可動配線部に広く使用されています。
FPCの可動形態としては摺動屈曲が一般的であり、優れた特性を有しています。→参考:耐屈曲性について
しかしながら、特に近年では、ウェアラブル機器やロボットなどの複雑な動作への追従性を得るために、耐捻回性や耐伸縮性といった、耐屈曲性以外の可動特性を要求されるケースが増えています。→参考:耐伸縮性について
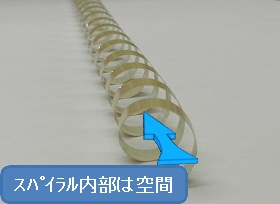
当社ではこのような要求に答えるべく、立体形状FPCを開発しました。→参考:立体形状FPC
下記に立体形状FPC(スパイラル形状)の可動形態と、その比較として一般的なFPCの可動形態を記します。
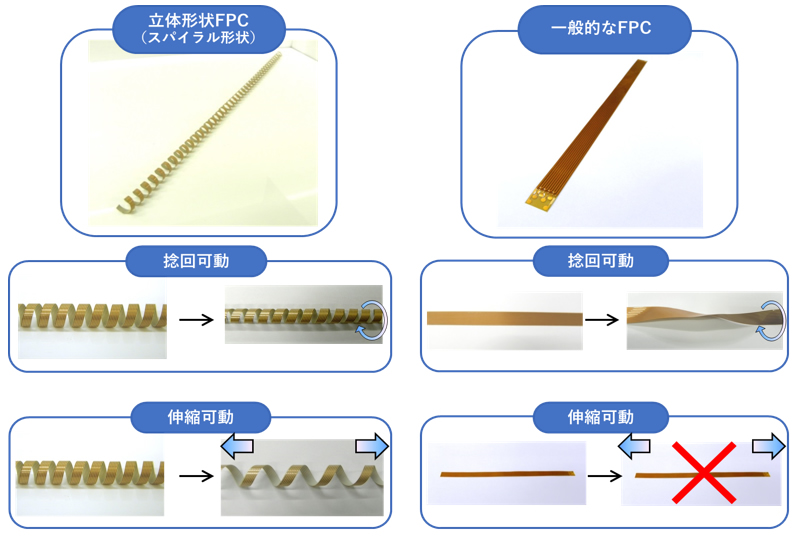
なお本項では耐捻回性についてご紹介します。
2.耐捻回性の試験方法について
FPCに対する耐捻回性の標準的な試験方法は規格化されていないため、 当社では下記の方法で試験を行っています。
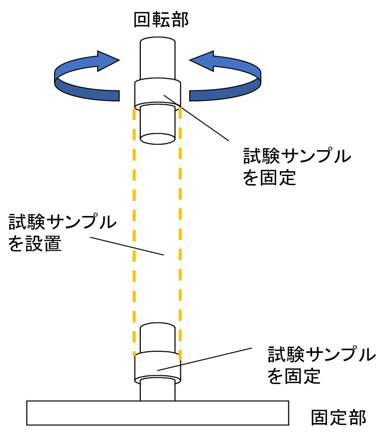
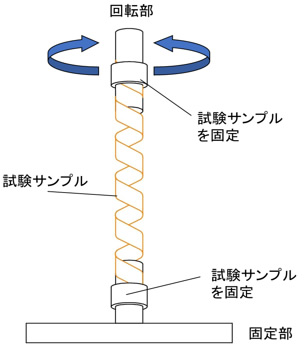
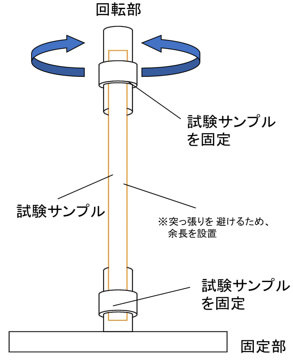
試験では回転部を±方向に回転運動させることによってFPCを捻回させます。
FPCの導体抵抗を捻回前後で測定し、導体抵抗の変化を観察します。
下記に紹介する耐捻回性のデータは、導体抵抗変化率10%を閾値として、到達するまでの捻回回数を測定しています。
3.FPCの耐捻回性について
立体形状FPC(スパイラル形状)と一般的なFPCの耐捻回性についてご紹介します。
※一般的なFPCは余長を設けず取り付けると、捻回の際に突っ張りが生じるため、余長を設ける必要があります。そのため下記の捻回試験についても余長を設けた状態で実施しています。
| 試験 対象 |
立体形状FPC(スパイラル形状) | 一般的なFPC |
|---|---|---|
| 試験 方法 |
|
|
| 耐捻 回性 |
1,000万回以上 | 数万回 |
| 捻回 可動 |
捻回可動への適用が可能です。 |
立体形状FPCと比較すると耐捻回性には |
| 活用例 |
|
|



- 製品・技術に関してのお問い合わせ